Ce terme comprend son système au sol et son aéronef (UAV).
Sur cette image, on peut voir le drone ainsi que son émetteur et sa station sol.

UAV – Unmanned Aerial Vehicule
Appelé aussi drone, c’est un aéronef sans pilote à bord. Il peut voler de manière autonome en liaison avec un ordinateur ou au moyen d’une radio-commande.

Les UAV’s deviennent prédominants depuis quelques années grâce à leurs innovations technologiques.
Le poids des batteries a tendance à se réduire alors que leurs puissance augmente.
Le développement des microprocesseurs rend possible l’exécution de fonctions avancées, inimaginables auparavant.
Les composants électroniques s’intègrent dans des circuits microscopiques.
Les UAV peuvent maintenant effectuer des taches autonomes qui jadis étaient impossibles.
–
Les drones à ailes fixes
Aéronefs capables de voler en utilisant leurs ailes grâce à la portance qu’elles génèrent.
La portance est créée par le mouvement de l’aéronef et l’épaisseur de leurs ailes.

Avantages des ailes fixes
- plus tolérantes dans les airs grâce à leur capacité à planer en cas de panne moteur
- possibilité de voler sur des plus longues distances

Inconvénients des ailes fixes
- leur décollage est parfois plus compliqué à mettre en œuvre
- elles nécessitent une plus grande distance pour atterrir
Les multicoptères
Les types de multicoptère
Aujourd’hui le monde des drones à voilure tournante est composé de plusieurs types de configuration en fonction du nombre de moteurs employés et de leur disposition sur le châssis
Chacune de ces configurations a ses avantages et ses inconvénients, ainsi le tricopter est plus maniable, étant équipé d’un servo pour le contrôle du lacet (Yaw) ce qui lui permet d’effectuer des mouvements beaucoup plus rapides.
Disposant d’un bras en moins il se montre également plus léger.
Toutefois le quadricoptère sera plus stable et mieux adapté pour maintenir sa position en l’air ou encore effectuer une opération demandant de la précision. De manière générale, au plus il y a des moteurs, au plus le drone sera stable et puissant.
TRICOPTERE
Drone doté de trois bras, disposant chacun d’un moteur. La face avant du drone est généralement placée entre deux des bras (Y3).

L’angle entre les bras peut varier mais il est généralement de 120 degrés.
Afin d’assurer le mouvement du lacet, le moteur arrière doit pouvoir être incliné (à l’aide d’un servomoteur RC normal). Il va ainsi contrecarrer l’effet gyroscopique du nombre impair de rotors, mais aussi modifier l’angle du lacet.
Un Y4 est légèrement différent du Y3, car il n’utilise pas de servomoteur mais la variation de régime de ses moteurs afin de gérer tous les effets gyroscopiques.
Avantages : L’Y3 vole plus comme un avion, en marche avant. Le prix est théoriquement plus faible, car il utilise un petit nombre de moteurs.
Inconvénients : Puisque l’appareil n’est pas symétrique, sa conception nécessite un servomoteur RC standard pour faire varier l’angle d’inclinaison du moteur arrière. Ceci rend sa réalisation moins évidente que pour d’autres types de multi-rotors. Le bras arrière est plus complexe car un servomoteur doit être installé le long de l’axe. La plupart des contrôleurs de vol, (mais pas tous) prennent en charge cette configuration.
Ces machines sont peu stables et ne disposent pas de redondance. En cas de panne d’un des moteurs ou d’une défaillance de l’ hélice, le drone tombera.
QUADRICOPTERE
Doté de quatre bras, disposant chacun d’un moteur .
La face avant du drone est généralement placée entre deux bras (configuration en x), mais peut aussi se trouver le long d’un bras (configuration en +).

Avantages : Il s’agit de la conception multi-rotor la plus populaire. Sa construction est plus simple et très polyvalente. Dans la configuration standard, les bras/moteurs sont symétriques autour de deux axes. Tous les contrôleurs de vol du marché peuvent travailler avec cette conception multi-rotors.
Inconvénients : Il n’y a aucune redondance, donc, s’il se produit une panne n’importe où dans le système, en particulier sur un moteur ou une hélice, l’engin va probablement s’écraser.
HEXACOPTERE
Doté de six bras, chacun d’eux connecté à un moteur.
La face avant du drone est généralement placée entre deux bras, mais peut aussi se trouver le long de l’un d’entre-eux.

Avantages : Ce type de configuration offre plus de poussée totale qu’un quadricoptère, ce qui signifie que l’appareil pourra soulever plus de charge utile. En outre, si un moteur tombe en panne, il reste encore une chance pour que l’appareil puisse atterrir plutôt que de s’écraser.
Inconvénients : Cette conception utilise des pièces supplémentaires, c’est pourquoi, par rapport à un quadricoptère qui nécessite un nombre minimum de pièces, l’hexacoptère équivalent (doté des mêmes moteurs et hélices) sera plus coûteux et plus grand.
Ces moteurs et pièces supplémentaires ajoutent du poids à l’engin, c’est pourquoi, afin d’obtenir le même temps de vol qu’un quadricoptère, la batterie devra également être plus grande (plus grande capacité).
Y6
Une conception Y6 est un type d’ hexacoptère qui au lieu d’avoir six bras en a trois.
Dotés d’un moteur installé des deux côtés de chaque bras, l’Y6 dispose au total de six moteurs. Notez que les hélices montées sur la face inférieure projettent la poussée vers le bas, comme celles installées sur le dessus de l’appareil.

Avantages : Une conception de type Y6 élimine réellement un bras (par rapport à un quadricoptère), pour un total de trois. Cela signifie que l’aéronef pourra soulever plus de charge utile par rapport à un quadricoptère, avec moins de composants qu’un hexacoptère normal.
Un Y6 n’a pas le même problème qu’un Y3, car il supprime l’effet gyroscopique en utilisant des hélices contrarotatives. En outre, si un moteur tombe en panne, il reste encore une chance pour que l’appareil puisse atterrir plutôt que de s’écraser.
Inconvénients : Il utilise des pièces supplémentaires, donc, par rapport à un quadricoptère conçu avec les mêmes composants, le Y6 équivalent est plus coûteux. Les moteurs et pièces supplémentaires ajoutent du poids à l’engin, c’est pourquoi, afin d’obtenir le même temps de vol qu’un quadricoptère de la même taille, la batterie devra également être plus grande (de plus grande capacité).
Le rendement obtenu avec un Y6 par opposition à un hexacoptère normal (à plat) est légèrement inférieur, car la poussée des hélices contrarotatives s’affecte mutuellement. Tous les contrôleurs de vol ne prennent pas en charge cette configuration.
OCTOCOPTERE
Doté de huit bras, chacun d’eux disposant d’un moteur. La face avant du drone est généralement placée entre deux des bras.

Avantages : Plus de moteurs = plus de poussée, ainsi qu’une redondance améliorée.
Inconvénients : Plus de moteurs = un prix plus élevé et un bloc batterie plus important. Lorsque vous atteignez ce niveau, la plupart des utilisateurs sont à la recherche de charges utiles très importantes telles que des appareils photo reflex numériques et des nacelles lourdes. Compte tenu du prix de ces systèmes, la redondance ajoutée est vraiment importante.
X8
Une conception X8 reste un octocoptère mais avec quatre bras, chacun d’eux pourvus de deux moteurs installés de chaque coté (des bras), pour un total de 8 moteurs.

Avantages : Plus de moteurs = plus de poussée, ainsi qu’un redondance améliorée. Plutôt que d’utiliser des moteurs plus puissants mais moins nombreux.
Les octocoptères ajoutent de la redondance en cas de panne moteur.
Inconvénients : Plus de moteurs = un prix plus élevé et un bloc batterie plus important.
Lorsque vous atteignez ce niveau, la plupart des utilisateurs sont à la recherche de charges utiles très importantes telles que des appareils photo reflex numériques et des nacelles lourdes.
–
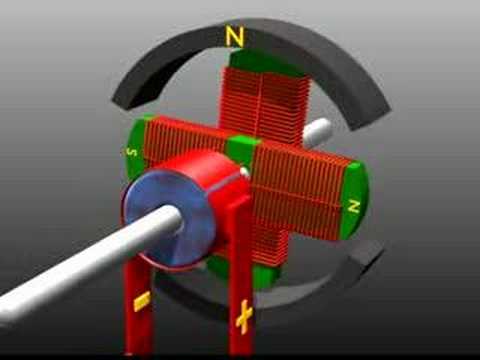
Les moteurs électriques
Le moteur électrique transforme l’énergie électrique fournie par la batterie en énergie mécanique.
Le courant qui parcourt le bobinage interagit avec un champ magnétique créé par des aimants permanents générant ainsi une force appelée couple. Le couple est proportionnel au courant ; si le courant augmente, le couple augmente.
Les moteurs que vous utiliserez auront un impact énorme sur la charge utile (ou la charge maximale) que pourra supporter votre UAV, ainsi que sur le temps de vol. Il est indispensable d’utiliser le même moteur sur tous les bras d’un multirotor.
Veuillez noter que, même si une paire de moteurs est de la même marque et du même modèle, tout comme de la même chaîne de production, sa vitesse peut varier légèrement, ce qui est quelque chose dont va se charger le contrôleur de vol.
Moteur à balais
Il est constitué d’une carcasse métallique qui contient des aimants permanents (stator) et d’un rotor qui est constitué d’un noyau métallique monté sur un axe et où s’enroulent une série de bobines. Le stator crée un champ magnétique fixe.
Les balais (ou « charbons ») alimentent le collecteur qui fait tourner le rotor en créant un champ magnétique.
Ce champ interagit avec celui du stator et fait tourner le rotor sur le principe de l’attraction / répulsion des pôles magnétiques, en faisant varier le sens du courant dans les bobines.
Appelés « brushed » en anglais, ils ont une durée de vie limitée. Les aimants permanents sont sensibles à la chaleur et perdent de leur capacité magnétique lorsqu’ils sont trop sollicités.

Moteur Brushless
Les moteur Brushless sont des moteur triphasés.
Ils n’ont pas de balais, ce qui implique une meilleure fiabilité et un rendement amélioré. Ils peuvent être à cage tournante (Outrunner) ou à cage fixe (Inrunner).
Ces moteurs sont constitués d’un rotor composé de plusieurs aimants permanents et du stator muni de plusieurs bobinages.
Ils utilisent la force contre électromotrice pour détecter la position du rotor en mesurant les variations des champs magnétiques.
Ce sont des moteurs asynchrones alimentés par un courant triphasé généré par le contrôleur (ou variateur, ou encore ESC en anglais) qui est un système électronique assurant la commutation du courant dans les bobinages.
La vitesse du moteur dépend de la fréquence du courant alternatif ainsi que de son intensité.
Ces moteurs disposent de trois fils d’alimentation, contrairement aux moteurs à balais qui n’en ont que deux.
Les bobines sont alimentées de façon récurrente, cela crée un champ magnétique tournant à la même fréquence que les tensions d’alimentation.
Pour que le moteur brushless tourne, les tensions d’alimentation doivent être adaptées continuellement afin que le champ reste en avance sur la position du rotor, ce qui crée un couple moteur.
Avantages du moteur à balais par rapport au moteur à courant continue : pas de frottement, ni usure.
Le KV
Le Kv (motor velocity constant ) est la caractéristique physique d’un moteur .
Un moteur à faible Kv est dit « coupleux » et un moteur à fort Kv est prédestiné à la vitesse .
Le KV est donc la vitesse de rotation d’un moteur pour 1 volt . Il indique le nombre de tour/min/volt du moteur à vide .
Si un moteur est alimenté par une tension U , sa vitesse de rotation est égale à : N = U * Kv
La constante de couple , Kc , est ce qui relie le couple fourni par le moteur et l’intensité qui la traverse : C = I * Kc
Le KV n’est qu’une valeur théorique a vide. En charge, cette valeur peut baisser entre 25% et 50%.
Plus le KV est haut et plus cette perte est importante.
Exemple : un moteur avec 1400 Kv sous 10 Volts tournerait a 14000 tour/min s’il est à vide.
Les moteurs à fort Kv sont des gros consommateurs d’énergie.
• intérêt des grands KV : pas besoin d’alimentation à grosse tension , cependant la consommation de courant reste élevée , ce qui nuit au rendement du contrôleur et force sur le contrôleur, ainsi que les accus . De plus, la faible inductance des bobines donne une impression d’accélération plus forte, le moteur étant plus vif.
• intérêt des petits KV : utilisation de faible quantité de courant, ce qui sollicite moins le contrôleur et la batterie. Le rendement du moteur est en légère hausse, tout comme celui du contrôleur. Ce moteur est moins vif à l’accélération et nécessite une tension plus élevée pour tourner.
–
Contrôleur de vitesse électronique (ESC)
Un ESC (acronyme anglais pour « Electronic Speed Controller » ou contrôleur de vitesse électronique) est ce qui permet à l’autopilote (contrôleur de vol) de faire varier la vitesse et la direction du sens de rotation d’un moteur.
L’ESC doit être capable de gérer le courant maximum que le moteur peut consommer, et d’être en mesure de le fournir à la bonne tension.
La plupart des ESC utilisés dans le secteur du loisir permettent seulement au moteur de tourner dans un sens, mais avec le bon microprogramme, ils peuvent fonctionner dans les deux sens.
Un ESC peut être déroutant de prime abord car plusieurs fils sortent sur deux côtés.
• Alimentation en entrée : Les deux fils épais (normalement de couleur noire et rouge) servent à obtenir l’alimentation depuis le faisceau/carte de répartition de l’alimentation, lui-même directement alimenté par la batterie principale.
• 3 connecteurs à cosses : Elles servent à relier l’ESC aux trois fils du moteur sans balais. Il existe des tailles standard de connecteurs sur le marché, mais parfois il faut remplacer celle du coté de l’ESC, ou du coté du moteur. Le plus sûr est toutefois d’éliminer ces connecteurs et de souder les fils ensemble.
• Connecteur de servomoteur RC à 3 broches : Ce connecteur accepte des signaux RC (PPM, PWM, sBus) et dispose souvent d’une alimentation à 5 V (fils rouge et noir ou brun).
On dit alors qu’il est pourvu d’un BEC (de l’anglais Battery Eliminator Circuit) qui sert à alimenter en 5 V les composants électroniques (récepteur de radiocommande, autopilote etc).

Circuit éliminateur de batterie (BEC – pour Battery Eliminator Circuit)
La plupart des contrôleur-moteurs (ESC) incluent un circuit appelé « Circuit éliminateur de batterie » ou BEC.
Historiquement, un seul moteur était nécessaire dans un véhicule radiocommandé, disposant d’un contrôleur (ESC).
Plutôt que d’utiliser un accumulateur séparé pour alimenter le récepteur de l’engin, le contrôleur-moteur (ESC) a été doté d’un système de régulation de tension interne disposant d’une sortie en 5V, éliminant ainsi cette seconde batterie.
Il est important de connaître l’intensité de courant que le circuit BEC d’un contrôleur-moteur (ESC) peut fournir, afin de s’assurer qu’il est capable d’alimenter correctement la partie électronique de l’aéronef.
Habituellement un tel circuit est capable de fournir au moins 1A sous 5V.
Dans un multi-rotor, vous aurez au moins quatre contrôleurs-moteur (ESC) à relier à l’autopilote, mais ce n’est que le circuit BEC d’un seul d’entre-eux qui sera utilisé comme source d’alimentation.
Les BEC des autres contrôleurs-moteurs ne seront pas utilisés.

Les batteries
Éléments chimiques
Les batteries utilisées dans les UAV sont aujourd’hui presque exclusivement au lithium polymère (LiPo), avec d’autres plus exotiques comme les lithium-manganèse ou autres variations de lithium.
L’acide-plomb n’est tout simplement pas une option et les batteries au NiMh/NiCd sont beaucoup trop lourdes pour leur capacité. D’ailleurs, très souvent, elles ne peuvent pas fournir les débits élevés de décharge nécessaires.
Les LiPo offrent une capacité élevée avec un faible poids, et les débits de décharge sont élevés.
Leurs principaux inconvénients sont leur coût, relativement élevé, et tout ce qui tourne autour de la sécurité de leur utilisation.

Tension (Volts)
La tension nominale d’une batterie LiPo est de 3.7V (tension à vide quand chargée à 50%) par élément.
C’est aussi la tension utilisée généralement pour le « mode stockage » de ces batteries.
Un pack mentionnant « 3S » possède 3 éléments en série (le + d’un élément est relié au – de l’élément suivant et ainsi de suite). Dans ce cas, la tension nominale à vide du groupe s’additionne et est de 3.7 + 3.7 + 3.7 V soit 11.1V
Le nombre d’éléments est important dans le choix du chargeur à utiliser pour recharger ces batteries.
Capacité (Ampères/heure ou Ah)
La capacité d’un bloc batterie se mesure en ampères/heure (Ah).
Les petits blocs d’accumulateurs peuvent être de l’ordre de 0,1 Ah (100 mAh) alors que les batteries pour drones de petite taille sont de 2 à 3 Ah (2 000 à 3 000 mAh).
Plus la capacité est élevée, plus le temps de vol est long, mais plus le bloc de la batterie devient lourd.
Le temps de vol d’un drone standard est habituellement de l’ordre de 10 à 20 minutes.
Ceci peut sembler court, mais il faut tenir compte du fait qu’un multirotor est toujours en train de lutter contre la gravité et que, contrairement à un avion, il n’a aucune surface aidant le vol ascensionnel.
En effet, un multirotor ne plane pas comme un avion.
Taux de décharge (C)
Le taux de décharge d’une pile au lithium est mesuré en C, où 1C est la capacité de la batterie (ampères-heures ou A/h)
Le facteur de décharge d’une batterie LiPo décrit son intensité maximale de décharge.
Ainsi, une batterie 2000 mAh 20C aura une intensité de déchargement de 20 fois sa capacité soit 20 x 2A = 40A.
Attention, les fabricants ont plutôt une tendance à surestimer ces chiffres, ce qui implique qu’il faudrait toujours compter avec un peu de marge, par rapport aux besoins de votre aéronef.
Le taux de décharge de la plupart des batteries LiPo est d’au moins 5C (cinq fois leur capacité). Toutefois, comme la plupart des moteurs utilisés dans les multirotors consomment pas mal de courant, la batterie devra être en mesure d’en fournir une quantité considérable, qui est souvent de l’ordre de 30 C ou plus.
Si vous remarquez après un vol que l’accumulateur chauffe fort, cela veut dire que le nombre de C est insuffisant.
Il ne faut jamais descendre en dessous de 3,2 V par élément durant son utilisation, au risque de détruire la batterie.
Connexion en série
Une batterie est composée d’un certain nombre d’éléments.
Ceux-ci peuvent être assemblés en série, en parallèle ou les deux.
La lettre « S » représente le nombre d’éléments reliés en série
Lorsque les éléments d’une batterie, ou même deux ou plusieurs batteries, sont reliés en série, leur tension (volts) s’additionne.
Schéma d’éléments reliés en série:

Connexion en parallèle
La lettre « P » représente le nombre d’éléments reliés en parallèle.
Lorsque les éléments d’une batterie, ou même deux ou plusieurs batteries, sont reliés en parallèle, leur capacité (ampères/heure ou mAh) s’additionne.
Schéma d’éléments reliés en série et en parallèle:

Exemple : 2 batteries de 5000mAh en parallèle donneront une capacité totale de 10000mAh.
Sécurité
Les batteries LiPo ne sont pas totalement sûres car elles contiennent de l’hydrogène gazeux sous pression et ont tendance à s’enflammer et/ou à exploser quand il y a un problème.
Ces accus peuvent être instables si l’on ne les utilise pas correctement.
C’est pourquoi, si vous avez le moindre doute sur une batterie que vous détenez, ne la branchez pas sur l’UAV ni même sur le chargeur.
Faites plutôt une croix sur cet accumulateur et débarrassez-vous en proprement.
Des signes indiquant que quelque chose ne va pas avec une batterie LiPo comprennent l’apparition de bosses ou un gonflement.
La batterie sera en effet bien plus grosse que lorsqu’elle était neuve.
Les batteries gonflées ne doivent plus être utilisées et elles sont à neutraliser d’urgence.

Pour neutraliser un accumulateur LiPo:
- le décharger avec le chargeur ou avec une ampoule
- préparer une solution saline (de eau avec du sel)
- laisser l’accumulateur dans la solution pendant cinq jours
- déposer le ensuite les au parc à containers

Chargement
La charge des batteries LiPo doit toujours commencer à courant de charge constant.
Par exemple, dans le cas d’une batterie de 5000mAh, l’intensité du courant de charge sera de 5A (5000mA, ce qui équivaut à 1C: une fois sa capacité) et avec une tension de 4.2 V par élément. La charge se terminera aussi avec une tension constante (4.2V/élément).
La plupart des batteries LiPo ont deux connecteurs :
- l’un est destiné à être le principal « de décharge » qui peut véhiculer un courant élevé
- l’autre, généralement plus petit et plus court, est le connecteur d’équilibrage
Ce connecteur d’équilibrage est presque toujours de type JST et sa couleur est blanche.
Il dispose d’un certain nombre de contacts, qui équivaut à celui des éléments de la batterie, plus la masse.
Ainsi, le connecteur d’équilibrage d’une batterie 3S (3 éléments), aura au total 4 contacts (un par élément + celui de la masse) .
C’est ce connecteur que vous raccorderez au chargeur, qui prendra alors soin de l’équilibrage individuel de chacun des éléments de la batterie.
Pour des raisons de sécurité, les batteries seront déconnectées du chargeur à la fin de la charge.
La prise d’équilibrage, sert à mesurer et équilibrer le niveau de charge de chaque cellule individuellement.

Lors du chargement d’une batterie LiPo, il est préférable de la conserver dans un sac de sécurité, prévu à cet effet.

Exemple : 2 batteries de 12V connectées en série donneront une tension totale de (12 + 12 = ) 24V.
Les hélices

Les hélices pour les drones multi-rotors sont aussi celles utilisées pour les avions radiocommandés.
Il est évident que l’on ne pourrait pas utiliser des pales d’hélicoptère RC, car ceci augmenterait considérablement l’encombrement des multirotors.
Un système de type hélicoptère exige également de faire varier le pas des pales, ce qui ajouterait de la complexité mécanique considérable.
On pourrait aussi se demander pourquoi ne pas utiliser un turboréacteur, des turbosoufflantes, un turbopropulseur etc. ?
Ces types de technologies sont en effet incroyablement intéressants pour fournir beaucoup de poussée, mais exigent aussi beaucoup d’énergie.
Si l’objectif du drone était de se déplacer très vite plutôt que de planer dans des espaces réduits, une des technologies précitées pourrait alors s’avérer être une bonne option.

La plupart des avions multi-rotors ont des hélices pourvues de deux ou trois pales. La version la plus courante est celle avec deux pales.
Ne présumez pas que l’ajout de plusieurs pales signifie automatiquement plus de poussée ; chaque pale doit voyager à travers le sillage de celle qui la précède, de sorte que, plus il y a de pales plus le sillage est fréquent.
Le rendement d’une hélice qui est trop proche du sciage d’une autre est diminué.
Une hélice d’un diamètre plus petit a moins d’inertie et peut donc accélérer et ralentir plus rapidement, ce qui permet des mouvements vifs ou acrobatiques.

La poussée produite par une hélice dépend de la densité de l’air, du régime de l’hélice, de son diamètre, de sa forme, de la surface des pales, et de son pas.
Le rendement d’une hélice se rapporte à l’angle d’attaque qui est défini comme le pas des pales moins l’angle d’hélice (l’angle entre la vitesse relative résultante et le sens de rotation de la pale).
Rotation
Les hélices sont conçues pour tourner dans le sens horaire (CW) ou anti-horaire (CCW).
Il est important de savoir quelle partie de l’hélice est destinée à faire face au haut (la surface supérieure est incurvée vers l’extérieur).
Si la conception de votre multi-rotor inverse certains des moteurs (comme c’est le cas pour les Vtail, Y6, X8), il faut penser à changer l’orientation des hélices, de sorte que la poussée soit toujours vers le bas.
Le haut de l’hélice doit toujours faire face au ciel.
La documentation fournie avec le contrôleur de vol vous présente le sens de rotation de chaque hélice pour les différentes configurations de multi-rotor (que ce contrôleur supporte).

Les matériaux
Le(s) matériau(x) utilisé(s) pour fabriquer les hélices peuvent avoir un impact modéré sur les caractéristiques du vol, mais la sécurité doit être la considération primordiale, surtout si vous êtes novice et inexpérimenté.

Polymère renforcé par des fibres
Une hélice en polymère renforcé de fibres (fibre de carbone, carbone renforcé de nylon, etc.) est une technologie « à la pointe du progrès » à plus d’un titre.

Plastique
Le plastique moulé par injection (ABS/ Nylon etc.) est le choix le plus populaire quand il s’agit des aéronefs multi-rotors.
Cela est principalement dû au faible coût de ces matériaux, leurs caractéristiques de vol intéressantes et leur
robustesse tout à fait respectable.
Une hélice en plastique qui a été renforcée avec de la fibre de carbone est sans doute le meilleur des choix, en raison de sa grande rigidité et de son coût qui reste raisonable.
Hélices repliables
Les hélices repliables ont une partie centrale qui se raccorde à deux pales pivotantes.
Lorsque le centre (qui est relié à l’arbre de sortie du moteur) tourne, la force centrifuge agit sur les pales, les poussant vers l’extérieur et rendant pour l’essentiel l’hélice « rigide », au même titre qu’une hélice fixe.
En raison d’une faible demande et du nombre de pièces nécessaires, les hélices à pales repliables sont moins fréquentes que les hélices fixes.
Comme prévu, une hélice repliable facilite le transport du RPA et, combinée avec un châssis pliable, la taille « rétractée » de l’UAV peut être beaucoup plus petite qu’en vol.
Les hélices repliables ont aussi le bel avantage de n’avoir qu’une pale à changer en cas d’impact.

Protections d’hélice
Les protections d’hélice (« prop gards ») se montent au châssis principal et offrent un anneau/coussinet fixe autour de l’hélice.
Si l’UAV devait entrer en contact avec un objet, ce sont ces protections qui toucheront les premières cet objet, en résistant à l’impact afin que les hélices ne soient pas touchées.
Les petits jouets UAV multi-rotors incluent souvent des protections d’hélice amovibles en plastique.
Comme toujours, il existe quelques inconvénients à utiliser des protections d’hélice :
• Elles peuvent être une source de vibrations
• Elles ne sont uniquement efficaces que pour des impacts de faible force
• Elles peuvent réduire la poussée, à cause des supports qui se trouvent directement sous les remous de l’hélice

Équilibrage
La plupart des hélices bon marché ne sont pas très bien équilibrées. Ceci est facile à vérifier si on place un axe (comme un crayon par exemple) au centre de l’hélice. On constatera alors probablement qu’un côté est plus lourd que l’autre.
C’est pourquoi il est toujours intéressant d’équilibrer vos hélices avant de les fixer sur les moteurs.
Il est très important que les hélices soient équilibrées, car les vibrations qu’elles pourraient générer se propageront peut-être jusqu’à l’autopilote, perturbant la régularité du vol.
Une hélice peut être équilibrée de nombreuses façons.
Un équilibreur d’hélice vous permettra de voir facilement où se trouvent les déséquilibres de masse.
Afin d’ajuster le poids, vous pouvez:
- soit poncer la partie la plus lourde (poncez uniformément la partie centrale de l’hélice seulement par opposition aux bords avant ou arrière, et NE découpez surtout PAS l’hélice)
- soit ajouter du ruban à masquer transparent (très mince) sur le côté le plus léger (et continuer à ajouter des longueurs de ruban uniformément jusqu’à ce qu’elle soit équilibrée).
Notez que plus vous effectuez la modification loin du centre (ponçage ou ajout de bande), plus il y aura d’effet, en raison du principe de couple.

–
Le contrôleur de vol
Un contrôleur de vol est un circuit intégré généralement composé d’un microprocesseur, de capteurs et de connecteurs d’entrée/sortie.
Ces modules permettent de stabiliser et sécuriser votre appareil en vol mais aussi de bénéficier de fonctions très intéressantes comme le RTH (retour au point de décollage), Stabilisation par GPS…
Lorsqu’il est nouveau, un contrôleur de vol doit être paramétré pour le type ou la configuration de votre drone spécifique, avant d’être utilisé.
C’est pourquoi vous devez définir certains paramètres dans son logiciel de gestion avant de transférer ces données sur la carte.

Les capteurs
Sur le plan matériel, un contrôleur de vol est essentiellement un microcontrôleur programmable standard relié à un certain nombre de capteurs embarqués.
Au strict minimum, un contrôleur de vol devra être équipé d’un gyroscope à trois axes, mais dans ce cas, il ne sera pas en mesure de gérer des fonctionnalités comme par exemple le maintien d’altitude automatique.
Tous les contrôleurs de vol n’intègrent pas tous les capteurs ci-dessous et peuvent n’inclure qu’une combinaison de ceux-ci.
Accéléromètre
Comme leur nom l’indique, les accéléromètres mesurent l’accélération linéaire sur les trois axes (appelons-les X, Y et Z).
Les unités s’expriment généralement en « gravité » (G) qui représente 9,81 m/s², ou 32 pieds/s².
La sortie d’un accéléromètre peut être intégrée deux fois pour envoyer une position, mais en raison de pertes dans l’émission, elle est soumise à une « dérive ».
Une caractéristique très importante des accéléromètres à trois axes est qu’ils détectent la gravité et peuvent donc indiquer la direction dans laquelle se trouve la partie inférieure de l’aéronef.
Ce dispositif joue un rôle majeur, puisqu’il permet à un aéronef multi-rotors de rester stable.
Il doit être monté sur le contrôleur de vol de façon à ce que les axes linéaires s’alignent avec les axes principaux de l’UAV.

Gyroscope
Un gyroscope mesure le taux de variation angulaire autour d’un axe. Les gyroscopes actuels peuvent effectuer ces mesures jusqu’à trois axes (appelons-les alpha, bêta et gamma).
Les unités sont souvent en degrés par seconde.
Veuillez noter qu’un gyroscope ne mesure pas directement les angles absolus, mais peut être utilisé pour obtenir l’angle qui, tout comme pour un accéléromètre, est sujet à la dérive.
La sortie d’un gyroscope actuel est généralement analogique ou numérique (I²C), mais dans la plupart des cas, vous n’avez pas à vous en préoccuper car cela est géré par le contrôleur de vol.
Le gyroscope est installé de sorte que ses axes de rotation s’alignent avec les axes de l’UAV.

Centrale à inertie (IMU)
Une IMU (de l’anglais Inertial Measurement Unit) se compose pour l’essentiel d’une petite carte qui contient à la fois un accéléromètre et un gyroscope (normalement ce sont des multi-axes).
La plupart sont pourvues d’un accéléromètre à trois axes et d’un gyroscope à trois axes. D’autres IMU peuvent contenir des capteurs supplémentaires tels qu’un magnétomètre à trois axes, pour un total de 9 axes de mesure.

Boussole/Magnétomètre
Une boussole électronique est capable de mesurer le champ magnétique terrestre et de l’utiliser pour déterminer la direction d’un drone (par rapport au nord magnétique).
Ce capteur est presque toujours présent si le système dispose d’une entrée GPS, et est disponible en version de un à trois axes.

Pression/Baromètre
Comme la pression atmosphérique change à mesure que vous vous éloignez du niveau de la mer, un capteur de pression peut être utilisé pour vous donner une lecture assez précise de l’altitude de l’UAV.
La plupart des contrôleurs de vol reçoivent à la fois des données d’altitude du capteur de pression et du GPS pour calculer de la façon la plus précise la hauteur de vol de l’aéronef par rapport au niveau de la mer.
Veuillez noter qu’il est préférable que le baromètre soit recouvert d’un morceau de mousse afin de diminuer les perturbations dues au vent.

GPS
Les systèmes de positionnement mondial (GPS) utilisent les signaux envoyés par un certain nombre de satellites en orbite autour de la Terre afin de déterminer leur emplacement géographique spécifique.
Un contrôleur de vol peut disposer soit d’un GPS intégré, soit d’un modèle externe relié par un câble. L’antenne GPS ne doit pas être confondue avec la puce GPS elle-même. Elle peut ressembler à une petite boîte plate ou encore à une antenne normale de type « bâton ».
Afin d’obtenir un verrouillage GPS précis, la puce GPS doit recevoir des données provenant de plusieurs satellites, et plus ils sont nombreux, mieux c’est.

Distance
Les capteurs de distance sont de plus en plus utilisés sur les drones puisque les coordonnées GPS et les capteurs de pression seuls ne peuvent pas vous dire à quelle distance de la terre vous vous trouvez (pensez aux collines, montagnes ou bâtiments) ainsi qu’aux objets qui se trouvent autour de votre drone.
Un capteur de distance orienté vers le bas peut être basé sur une technologie ultrasonique, laser ou lidar (les infrarouges présentent des problèmes à cause de la lumière du soleil).

Modes de vol
Un « mode de vol » est la façon dont le contrôleur de vol utilise les entrées des capteurs et les signaux provenant de la radiocommande afin de faire voler et stabiliser l’aéronef.
Si vous disposez d’un émetteur doté de cinq canaux ou plus, vous pouvez être en mesure de configurer le logiciel pour vous permettre de changer le mode de vol via le 5e canal (interrupteur auxiliaire), et ce durant le vol.
–
Le système de communication
L’onde radio
L’onde radio est une onde électromagnétique.
Elle est définie par sa longueur d’onde et sa polarisation.
La fréquence de l’onde radio dépend directement de la longueur d’onde, et de la vitesse de propagation de l’onde qui est à peu près constante et égale à celle de la lumière (soit 300 000 kilomètres par seconde environ).
L’onde radio (onde électromagnétique) est l’association d’un champ électrique et d’un champ magnétique qui se déplacent ensemble, en ondulant, l’un toujours perpendiculaire à l’autre.

La longueur d’onde
La longueur d’onde est une grandeur métrique, elle définit la distance entre deux valeurs remarquables de l’onde (le maximum d’intensité par exemple). Pour des vagues, la longueur d’onde serait la distance entre deux crêtes de vagues.

Polarisation
L’onde radio est aussi définie par sa polarisation. C’est le champ électrique qui définit la polarisation de l’onde électromagnétique.
Si le champ électrique de l’onde oscille dans un plan vertical, alors l’onde est dite « polarisée verticalement ».
Si il oscille dans un plan horizontal, l’onde est polarisée horizontalement.

Les fréquences
La plupart des ensembles de radiocommande utilisées fonctionnent désormais sur la bande des 2,4Ghz. Cette bande de fréquences est beaucoup plus intéressante que celles utilisées avant: 26 Mhz, 35 Mhz, 41 Mhz, ou 72Mhz.
Parmi les principaux avantages qu’elle offre, on peut citer la possibilité d’un très grand nombre d’utilisateurs simultanés sans perturbation (sans avoir besoin de gérer les fréquences) et la télémesure qui permet désormais de savoir se qui se passe dans le aéronef en temps réel, grâce à divers capteurs.
Un phénomène est dit périodique s’il se reproduit avec les mêmes caractéristiques.
La fréquence est le nombre de fois ou un phénomène va être observé durant une unité de temps fixée.
La période est l’inverse de la fréquence. On note : T = 1/f
Si l’unité de temps choisie est la seconde, la fréquence sera mesurée en hertz (Hz).

Gammes de fréquences
Pour le télépilote, la seule gamme de fréquence utilisée pour les communications sera certainement la VHF.
A savoir que les avions longs courriers utilisent encore les radios HF pour les traversées de grands espaces (océans, déserts,..) bien que ce moyen de soit franchement obsolète de nos jours.
Les militaires utilisent des gammes UHF.
Enfin, l’usage des communications numériques par satellite est de plus en plus courant pour les longues distances, employant également la bande UHF.
Comment s’y retrouver dans toutes ces bandes de fréquences ?
VHF pour Very High Frequency (très haute fréquence), HF pour high frequency.
Une phrase mnémotechnique en anglais permet de retenir l’ordre de ces gammes :
Very Lovely Maidens Have Very Useful Sewing Equipments
(en français : les très charmantes demoiselles ont de très utiles équipements de couture… mignon, mais la phrase ne sert à rien dans notre langue)
Bandes de fréquences utilisées
Very – VLF – 3 à 30 KHz – Sous marins
Lovely – LF – 30 à 300 KHz – Radio grand public grandes ondes, radio amateurs
Maidens – MF – 300 KHz à 3 MHz
Radio grand public ondes moyennes, radio amateurs, balises de secours avalanches
Have HF – 3 à 30 MHz – Transmissions longue portée, armée, espace Very VHF – 30 à 300 MHz
Communication radio aéro, bateau, etc., radionavigation, bande FM
Useful UHF – 300 MHz à 3 GHz
TV hertzienne, communications militaires, GSM, Wifi, DECT, RFID,…
Sewing – SHF – 3 à 30 GHz
Communications satellite, radioastronomie, radio-altimètres
Equipments – EHF – 30 à 300 GHz Radioastronomie
La communication radio avec le RPAS est utilisée conformément à la loi du 13 juin 2005 relative aux communications électroniques et de ses arrêtés d’exécution, en particulier l’arrêté royal du 18 décembre 2009 relatif aux communications radioélectriques privées et aux droits d’utilisation des réseaux fixes et des réseaux à ressources partagées.
La communication radio avec le RPAS est opérationnelle pendant toute la durée du vol.
La communication radio entre le télépilote et l’observateur RPA est opérationnelle pendant toute la durée du vol.
Si les fréquences utilisées subissent des interférences, la zone d’exploitation est scannée sur les fréquences interférentes avant l’exécution du vol.
La radio – télécommande
Pour diriger un modèle depuis le sol, il faut utiliser un émetteur qui transmet les ordres du pilote à l’aéronef par voie hertzienne selon une fréquence déterminée. Les anciennes radiocommandes utilisaient des quartz (cristaux) pour opérer sur ces fréquences.
On pouvait aussi utiliser une télécommande à synthèse de fréquence ; dans ce cas, il n’y a plus de quartz. Le choix de la fréquence est directement paramétré dans l’émetteur.
Les ordres sont donnés par l’intermédiaire de deux manches qui permettent de diriger le modèle sur les différents axes (gaz, ailerons, profondeur, dérive).

Ces manches peuvent être manipulés horizontalement et verticalement. On trouve aussi sur l’émetteur des interrupteurs et des potentiomètres qui permettent d’apporter des modifications aux réglages du drone depuis le sol (ex : les trims qui permettent de corriger certains réglages).
Le récepteur placé dans le drone reçoit les ondes que lui envoie l’émetteur.
Le récepteur transforme ces ondes en signaux de commandes, envoyés à l’autopilote, qui lui les envoie aux moteurs, permettant ainsi le contrôle de l’appareil (gaz, tangage, roulis, lacet).

Si votre récepteur est pourvu de deux antennes, il faut toujours former un angle de 90 degrés avec ces dernières.
Il existent des récepteurs spécifiques pour les châssis en carbone.
La procédure d’appairage entre la radio et le récepteur s’appelle BIND(ING).Il s’agit de l’appairage entre l’émetteur et le récepteur.
Lors de cette procédure une clef numérique de codage serra crée entre la radio et le récepteur un peu comme à la maison avec votre routeur wifi. Ceci assure une liaison codée et permet qu’une autre personne puisse utiliser une radiocommande près de vous sans perturber votre liaison radio.
Le 2.4 GHZ est une onde courte sur le spectre des fréquences.
Elle ne passe pas à travers l’eau et est fortement limitée en zone urbaine.
Les performances maximum en matière de portée sont atteintes sur un terrain dégagé.
Attention à ne jamais voler derrière vous et veillez aussi à ce que personne ne se place devant vous lorsque vous volez.
Le corps humain est en effet composé de 60 % d’eau, ce qui constitue un écran pour les ondes.
Il existe 4 modes d’utilisation de la radiocommande. Les modes les plus couramment utilisés sont les 1 et 2.

Le 2.4 Ghz
Une nouvelle génération de radiocommandes dépourvues de quartz se généralise depuis quelques années.
Elles émettent sur la bande de 2.4 Ghz ; ce qui permet à plusieurs radios de partager la même fréquence.
Cette bande de fréquences permet aussi l’échange d’informations entre l’émetteur et le récepteur par l’intermédiaire de modules spécifiques (vitesse, altitude, mesure de tension, mesure de courant, etc…). C’est que l’on appelle la télémétrie.
Ces radiocommandes fonctionnent dans la bande de fréquences 2.4000 à 2.4835 GHz.
Le système de modulation utilisé (recherche automatique des canaux libres) procure deux avantages : une sécurité renforcée et un grand nombre de fréquences utilisables (80).
En Belgique, la règlementation limite la puissance d’émission : 100mW pour la bande 2400 – 2454 Mhz
25 mW pour la bande 5800 Mhz
Note : ces fréquences ne sont pas exclusivement réservées à l’aéromodélisme.
L’utilisateur doit préalablement initialiser et appairer (binding) le récepteur afin qu’il mémorise le code d’identification de l’émetteur (cette opération n’est à faire qu’une seule fois lors de la première mise en service).
On peut appairer plusieurs récepteurs à un émetteur.
Lors de allumage de l’émetteur sur le terrain, le système sélectionne sa fréquence d’émission (qui n’est pas obligatoirement fixe) et le récepteur vient s’y caler après avoir identifié le code de l’émetteur.
Afin d’éviter les brouillages, l’émetteur balaye plusieurs fréquences ; le récepteur retrouve les bonnes données toujours grâce au code d’identification de l’émetteur.
La zone Fresnel
Lorsque l’on fait voler nos UAV en 2.4 Gz, la zone autour est appelée zone de Fresnel.
Quand le signal quitte l’antenne d’émission les ondes radio sont diffusées dans un cercle.
Le signal primaire voyage en ligne droite vers le récepteur.
Cet espace doit être libre ou alors la longueur du signal pourrait être diminuée.
Les ondes radio peuvent être absorbées ou réfléchies par des objets ou par l’environnement proche.
Ces ondes réfléchies, lorsque elles atteignent le récepteur, diminuent la portée du signal (F1 et F2) et créent ainsi des interférences.

Les interférences
En radio, une interférence est la superposition de deux ou plusieurs ondes.
Il est courant, pour les fréquences supérieures à quelques centaines de kilohertz, qu’une antenne de réception reçoive simultanément l’onde directe en provenance de l’émetteur et une (ou plusieurs) ondes réfléchies par un obstacle.
Les deux signaux vont alors se superposer et, en fonction de la différence de phase entre eux, voir leurs amplitudes s’additionner ou se soustraire.
Ce genre d’interférence est responsable du « fading », terme anglo-saxon désignant une variation plus ou moins rapide de l’amplitude du signal reçu. Mais le phénomène ne se limite pas aux seules ondes radio.
Dans le sens commun, pour la radio, cela a pris le sens de « parasite » (il s’agit en fait de l’interférence entre l’onde radio et une onde parasite).

–
Considérations pratiques au vol
La loi de Bernoulli
Lorsque la vitesse d’un fluide augmente, sa pression diminue.
Notons que le principe s’applique aussi aux fluides compressibles comme le gaz, mais seulement dans des cas où la variation de pression ne dépasse pas quelques pourcents.


Les 4 forces en aéronautique
Comment les avions, hélicoptères et RPAS utilisent ces forces pour voler ?
- La trainée est la force créée par le vent relatif et qui s’oppose au déplacement.
- L’incidence est l’angle formé par l’inclinaison de la main par rapport à la direction du vent relatif.
- La portance est la force créée par l’incidence de la main et qui pousse la main vers le haut.
- La traction est la force créée par le moteur qui crée le déplacement vers l’avant.

Les 3 types de mouvements
En tournant, les hélices vont créer une force de sustentation (voir définition ci-dessous) qui vont compenser le poids de l’engin. Lorsque cette force est supérieure au poids du multicoptère, il s’élève dans les airs.

Définition sustentation :
la sustentation est l’effet d’une force qui maintient un corps à faible distance au dessus d’une surface et sans contact avec elle.

Le sens de rotation des hélices est très important, sur le schéma ci-dessous, on constate que les hélices situées sur le même axe tournent dans le même sens. En d’autres termes, M1 et M3 tournent dans le sens horaire et M2 et M4 dans le sens antihoraire.

Pourquoi ?
Cela annule le couple induit par l’effort sur chaque moteur pour faire tourner les hélices.
Monter / Descendre
Pour monter, on augmente la vitesse des moteurs simultanément, tous les moteurs tournent au même régime et inversement pour descendre, c’est la commande des gaz.

Le Tangage : Avancer / Reculer
Pour avancer, on va diminuer la vitesse des moteurs avant et augmenter la vitesse des moteurs arrière et inversement pour reculer. On appelle cette action le « Tangage » ou « Pitch »


Le Roulis : Gauche / Droite
Pour incliner vers la gauche, on va diminuer les moteurs de gauche M1 et M2 et augmenter ceux de droite M3 et M4.
Inversement pour incliner vers la droite. Cette action s’appelle le « Roulis » ou « Roll »


Le Lacet : Rotation
Pour un mouvement de rotation vers la droite ou la gauche, on va augmenter la vitesse d’une paire de moteurs sur le même axe tout en diminuant celle des moteurs du 2eme axe.
Ceci est un mouvement de « Lacet » ou « Yaw » et il est généré grâce à l’effet de couple provoqué par la variation de la vitesse de rotation des moteurs.


L’effet de sol
Phénomène lié à la portance, l’effet de sol mérite un petite attention particulière parce qu’il reste assez mystérieux pour beaucoup de gens.
Il se manifeste lorsqu’un appareil vole très très près du sol par une augmentation de la portance et une diminution de la trainée.
Que se passe- t-il?
L’air, chassé vers le bas par l’aile se retrouve bloqué par la présence du sol et s’y comprime légèrement avant de changer de direction.


Imaginez que vous soyez dans un train lancé à vive allure et entrant dans un tunnel, et que la fenêtre soit ouverte, au moment de l’entrée dans le tunnel, vous ressentirez comme une surpression passagère.
En avançant, le train provoque l’écartement brutal de l’air devant lui. Cet air, chassé vers les côtés, rencontre les parois du tunnel et s’y comprime légèrement avant de trouver à s’échapper.
Un autre phénomène apparait dans l’effet de sol : les tourbillons d’extrémité de voilure (ceux qui sont en partie responsables de la trainée induite) sont gênés par la présence du sol.
Indice KP
L’indice géomagnétique global Kp est largement utilisé dans les études ionosphériques et la magnétosphère et est généralement reconnu comme indice mesurant l’activité géomagnétique dans le monde entier.
Kp est l’un des indices les plus couramment utilisés pour indiquer la gravité des perturbations magnétiques mondiales dans l’espace proche de la Terre.
L’unité Kp est une abréviation de K-index planétaire et la lettre K provient du mot allemand Kennziffer signifiant chiffres caractéristiques.
Le K-index quantifie les perturbations horizontales du champ magnétique terrestre par un nombre entier dans la page de 0 à 9, 1 étant calme et 5 ou plus indiquant un orage magnétique.
Ce tableau est mis à jour toutes les 10 minutes et les mauvaises données sont automatiquement rejetée.

Site pour identifier la valeur Kp
CG ou centre de gravité
Un avion évolue sur trois axes, le centre de ces deux axes est le centre de gravité. Le drone a également un centre de gravité.
Centrage d’un drone et répartition de la charge
• Pour centrer le drone, on prend comme référence le centre du châssis.

Conclusion
Un avion ou un RPA mal centré va générer de la trainée.
Un mauvais centrage et sans assistance GPS, le drone sera plus difficile à contrôler.
–
Procédures de sécurité
Dispositifs de sécurité
Capteur barométrique
permet de connaître son altitude de vol en temps réel.

Dispositif «failcrash»
permet de forcer un atterrissage lorsque l’aéronef sort du volume prévu de vol ou lorsque nécessaire.
(ce dispositif doit fonctionner en cas de perte de la liaison radio).

Dispositif de protection lors de crash
Ce dispositif doit pouvoir se déclencher automatiquement en cas de procédure d’atterrissage d’urgence (failcrash), ou sur décision du télépilote, comme un parachute.

Dispositifs de navigation
les drones doivent être équipés de télémétrie qui permette au télépilote de connaitre le positionnement de l’aéronef.
La télémétrie consiste au rapatriement d’informations du drone sur votre ordinateur ou sur votre radiocommande afin de suivre l’évolution de votre aéronef de manière très précise.

Préparation d’une mission aérienne à l’aide d’un drone
Le pilote effectue la check-list en amont de la prestation aérienne à l’aide d’un drone :
- Assure un périmètre de sécurité au point
d’élévation du drone. Aucune personne hormis le pilote du drone et le cas échéant, son opérateur, ne doit se trouver dans ce périmètre. Toutefois, si d’autres personnes se retrouvent dans ce périmètre, elles devront avoir été informées de la procédure en cas d’accident.
- Cette zone pourra être matérialisée par un ruban de sécurité pour éviter toutes instructions lors de l’évolution du drone.
- S’assure au moyen des cartes et renseignements aéronautiques de la non présence d’autres aéronefs ou d’autres activités particulières sur le lieu de prises de vues.
- Informe toute personne présente dans l’entourage proche du point d’élévation, du respect obligatoire de ce périmètre de sécurité.
- Identifie une ou plusieurs zones au sol de telle sorte que le drone puisse
à tout instant en atteindre une en cas de panne, sans risque de dommages aux tiers au sol.
- Vérifie que l’élévation du drone, depuis le point d’envol déterminé, ne posera aucune gêne aux biens environnants (maisons, immeubles, voitures,….)
- En cas d’élévation depuis un terrain privé, l’exploitant ou le pilote du drone fait une demande préalable au propriétaire du terrain.
- S’assure du respect de la réglementation.
- Le pilote du drone ne peut pas faire évoluer son drone, s’il est à bord d’un véhicule en déplacement, sauf autorisation spécifique demandée auprès des organismes compétents.
- Le pilote du drone s’assure avant tout vol de son drone, que les réserves d’énergie nécessaires au vol lui permettront d’effectuer le vol prévu avec une marge de sécurité adaptée.
- En cas d’incidents ou d’accidents, un rapport de l’évènement doit être effectué et doit être reporté à la DGTA.
- Le vol de nuit est interdit.
Exemple de checklist Prévol